HMM(隐马尔可夫模型)是用来描述隐含未知参数的统计模型,举一个经典的例子:一个东京的朋友每天根据天气{下雨,天晴}决定当天的活动{公园散步,购物,清理房间}中的一种,我每天只能在twitter上看到她发的推“啊,我前天公园散步、昨天购物、今天清理房间了!”,那么我可以根据她发的推特推断东京这三天的天气。在这个例子里,显状态是活动,隐状态是天气。
2014年11月23日更新:
我已利用HMM角色标注实现了中国人名、翻译人名、日本人名、地名、机构名等命名实体的识别,请参考此目录命名实体识别。
HMM描述
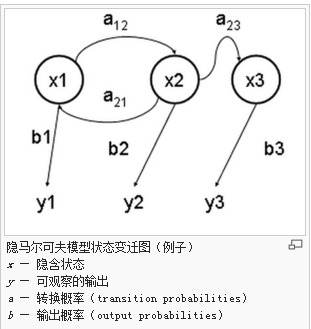
任何一个HMM都可以通过下列五元组来描述:
:param obs:观测序列 :param states:隐状态 :param start_p:初始概率(隐状态) :param trans_p:转移概率(隐状态) :param emit_p: 发射概率 (隐状态表现为显状态的概率)
例子描述
这个例子可以用如下的HMM来描述:
states = ('Rainy', 'Sunny')
observations = ('walk', 'shop', 'clean')
start_probability = {'Rainy': 0.6, 'Sunny': 0.4}
transition_probability = {
'Rainy' : {'Rainy': 0.7, 'Sunny': 0.3},
'Sunny' : {'Rainy': 0.4, 'Sunny': 0.6},
}
emission_probability = {
'Rainy' : {'walk': 0.1, 'shop': 0.4, 'clean': 0.5},
'Sunny' : {'walk': 0.6, 'shop': 0.3, 'clean': 0.1},
}
求解最可能的天气
求解最可能的隐状态序列是HMM的三个典型问题之一,通常用维特比算法解决。维特比算法就是求解HMM上的最短路径(-log(prob),也即是最大概率)的算法。
稍微用中文讲讲思路,很明显,第一天天晴还是下雨可以算出来:
-
定义V[时间][今天天气] = 概率,注意今天天气指的是,前几天的天气都确定下来了(概率最大)今天天气是X的概率,这里的概率就是一个累乘的概率了。
-
因为第一天我的朋友去散步了,所以第一天下雨的概率V[第一天][下雨] = 初始概率[下雨] * 发射概率[下雨][散步] = 0.6 * 0.1 = 0.06,同理可得V[第一天][天晴] = 0.24 。从直觉上来看,因为第一天朋友出门了,她一般喜欢在天晴的时候散步,所以第一天天晴的概率比较大,数字与直觉统一了。
-
从第二天开始,对于每种天气Y,都有前一天天气是X的概率 * X转移到Y的概率 * Y天气下朋友进行这天这种活动的概率。因为前一天天气X有两种可能,所以Y的概率有两个,选取其中较大一个作为V[第二天][天气Y]的概率,同时将今天的天气加入到结果序列中
-
比较V[最后一天][下雨]和[最后一天][天晴]的概率,找出较大的哪一个对应的序列,就是最终结果。
这个例子的Python代码:
# -*- coding:utf-8 -*-
# Filename: viterbi.py
# Author:hankcs
# Date: 2014-05-13 下午8:51
states = ('Rainy', 'Sunny')
observations = ('walk', 'shop', 'clean')
start_probability = {'Rainy': 0.6, 'Sunny': 0.4}
transition_probability = {
'Rainy' : {'Rainy': 0.7, 'Sunny': 0.3},
'Sunny' : {'Rainy': 0.4, 'Sunny': 0.6},
}
emission_probability = {
'Rainy' : {'walk': 0.1, 'shop': 0.4, 'clean': 0.5},
'Sunny' : {'walk': 0.6, 'shop': 0.3, 'clean': 0.1},
}
# 打印路径概率表
def print_dptable(V):
print " ",
for i in range(len(V)): print "%7d" % i,
print
for y in V[0].keys():
print "%.5s: " % y,
for t in range(len(V)):
print "%.7s" % ("%f" % V[t][y]),
print
def viterbi(obs, states, start_p, trans_p, emit_p):
"""
:param obs:观测序列
:param states:隐状态
:param start_p:初始概率(隐状态)
:param trans_p:转移概率(隐状态)
:param emit_p: 发射概率 (隐状态表现为显状态的概率)
:return:
"""
# 路径概率表 V[时间][隐状态] = 概率
V = [{}]
# 一个中间变量,代表当前状态是哪个隐状态
path = {}
# 初始化初始状态 (t == 0)
for y in states:
V[0][y] = start_p[y] * emit_p[y][obs[0]]
path[y] = [y]
# 对 t > 0 跑一遍维特比算法
for t in range(1, len(obs)):
V.append({})
newpath = {}
for y in states:
# 概率 隐状态 = 前状态是y0的概率 * y0转移到y的概率 * y表现为当前状态的概率
(prob, state) = max([(V[t - 1][y0] * trans_p[y0][y] * emit_p[y][obs[t]], y0) for y0 in states])
# 记录最大概率
V[t][y] = prob
# 记录路径
newpath[y] = path[state] + [y]
# 不需要保留旧路径
path = newpath
print_dptable(V)
(prob, state) = max([(V[len(obs) - 1][y], y) for y in states])
return (prob, path[state])
def example():
return viterbi(observations,
states,
start_probability,
transition_probability,
emission_probability)
print example()
输出:
0 1 2 Rainy: 0.06000 0.03840 0.01344 Sunny: 0.24000 0.04320 0.00259 (0.01344, ['Sunny', 'Rainy', 'Rainy'])
NLP应用
具体到分词系统,可以将天气当成“标签”,活动当成“字或词”。那么,几个NLP的问题就可以转化为:
-
词性标注:给定一个词的序列(也就是句子),找出最可能的词性序列(标签是词性)。如ansj分词和ICTCLAS分词等。
-
分词:给定一个字的序列,找出最可能的标签序列(断句符号:[词尾]或[非词尾]构成的序列)。结巴分词目前就是利用BMES标签来分词的,B(开头),M(中间),E(结尾),S(独立成词)
-
命名实体识别:给定一个词的序列,找出最可能的标签序列(内外符号:[内]表示词属于命名实体,[外]表示不属于)。如ICTCLAS实现的人名识别、翻译人名识别、地名识别都是用同一个Tagger实现的。
小结
HMM是一个通用的方法,可以解决贴标签的一系列问题。
我改寫了一個執行後比較容易懂的版本,歡迎參考
https://gist.github.com/3754e6988edb357fcf5920568f6891e4.git
【因马尔科夫变迁图】最后一行,b-输出概率(output probabilities)和上文中的输出概率(emission probability)不一致。是笔误么?应该是一种表达吧
这个demo有点问题,在隐马尔科夫模型下的概率路径图是个篱笆图,可以用贪婪算法(在这里是viterbi ), 每一步都取局部最优,最后的结果就是全局最优。
第二天取Sunny的原因是该隐状态是在前一天隐状态取Sunny的条件下计算得出的极大似然假设.
Demo最后的结果我认为应该是Sunny, Sunny, Rainy.
并不是这样的,
首先,计算得到的最终的最大概率为(rainy,0.01344)回溯到上一天是(rainy, 0.03840)再回就到了第一天(sunny, 0.24)
因此(sunny,rainy,rainy)是全局最优的最短路径,局部最优不一定能得到全局最优。
全局最优路径上的各节点至起点的路径是最短的,但局部最优节点不一定在这条路径上
例如这里第二天最优节点是(sunny,0.04320),但基于这个节点计算到终点的概率并不是最优的
分别是(sunny,sunny,0.002596)(sunny,rainy,0.00864) 都小于最优概率(rainy,rainy,0.01344)
从结果看,第二天似乎应该是天晴才对吧,天晴的概率是0.04320,下雨的概率是0.0340,难道是我理解错了吗?![[吃惊]](http://img.t.sinajs.cn/t35/style/images/common/face/ext/normal/f4/cj_org.gif "[吃惊]")
对,你理解错了,0.04320是累积概率,第二天天晴是局部最优,必须以最终(第三天)的全局最优为准。
第一天为天晴的概率为0.24,根据这个条件,计算第二天为天晴和下雨的概率分别为0.0432,0.0384,这时候我觉得第二天应该为天晴,在这个条件下,再计算第三天为天晴和下雨的概率分别为0.00259,0.00864,所以我觉得最后的结果应该为Sunny,Sunny,Rainy。想请教一下大神,这样理解对不?
第三天为Rainy最优的情况是在第二天为Rainy的时候才能取到